

近期,河海大学地球科学与工程学院何秀凤教授课题组及其合作者在测量与遥感领域顶刊《ISPRS Journal of Photogrammetry and Remote Sensing》上发表了题为“DALI-SLAM: Degeneracy-Aware LiDAR-inertial SLAM with novel distortion correction and accurate multi-constraint pose graph optimization”的研究论文。
激光雷达-惯性同步定位与建图(LiDAR-Inertial Simultaneous Localization and Mapping, LI-SLAM)在机器人定位导航与低成本三维建图等应用中发挥了至关重要的作用。然而,现有LI-SLAM性能仍受限于运动畸变校正与位姿图约束不准确以及LiDAR特征退化等问题。现有的FAST-LIO2方法借助惯性测量单元(Inertial Measurement Unit, IMU)进行运动畸变校正,但IMU积分的累积误差导致越靠近帧末的激光点校正误差越大。此外,固态LiDAR(如Livox Avia)受到扫描频率低、视场角受限的影响,易发生特征退化。总之,现有方法未充分考虑激光特征退化对位姿估计的影响,导致多源数据融合位姿精度低。针对上述挑战,研究团队提出了一种精确且鲁棒的激光惯性SLAM方法DALI-SLAM(方法流程见图1)。该方法的贡献点如下:
提出了一种基于双样条的点云运动畸变校正方法,利用当前帧到地图的配准姿态和IMU的积分姿态分别拟合连续时间轨迹,以更新离散IMU位姿,提升了点云运动畸变校正的精度。
提出了一种退化感知的卡尔曼滤波更新策略,将雅可比矩阵重映射算法引入到基于紧耦合滤波器的LIO系统中,减轻LiDAR特征退化对传感器融合的影响。
提出了一种鲁棒的迭代最近点(ICP)方法变体并准确构建了连续、共视、回环三类位姿图约束,实现了全局一致地图构建。
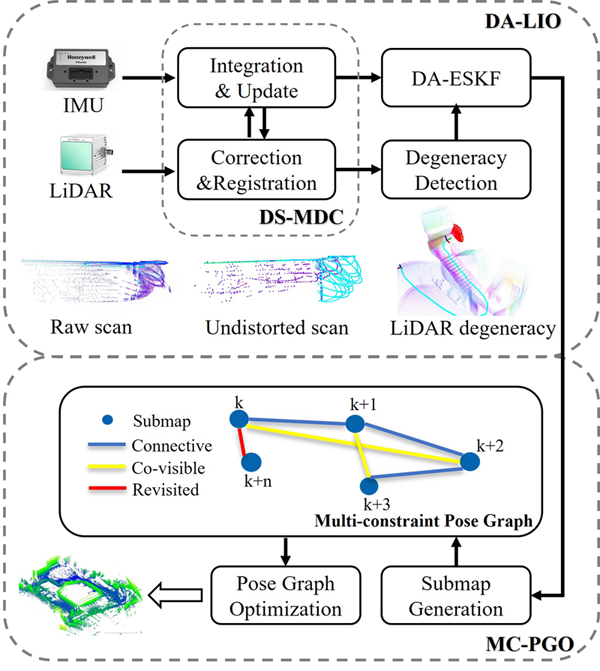
图1 研究方法框架图
研究团队使用头盔式激光扫描系统在典型室内外场景采集了四个序列数据,与现有激光惯性里程计方法和后端优化方法进行对比验证,充分验证了DALI-SLAM方法的有效性。结果表明,该方法前端部分与基于滤波器的SOTA方法FAST-LIO2相比,轨迹的均方根误差分别减少了53.9%、35.1%和7.9%;该方法后端部分分别将轨迹误差进一步降低了25.2%、9.2%和52.4%。在序列4上三维建图对比结果见图2。
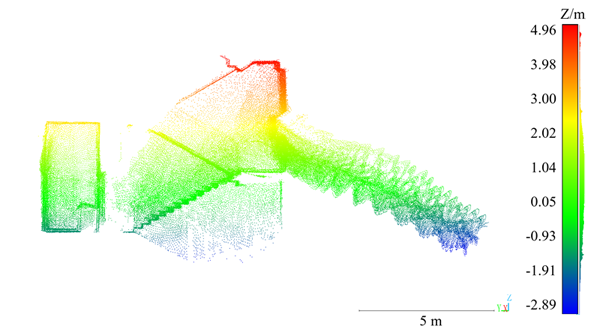
(a) CLINS
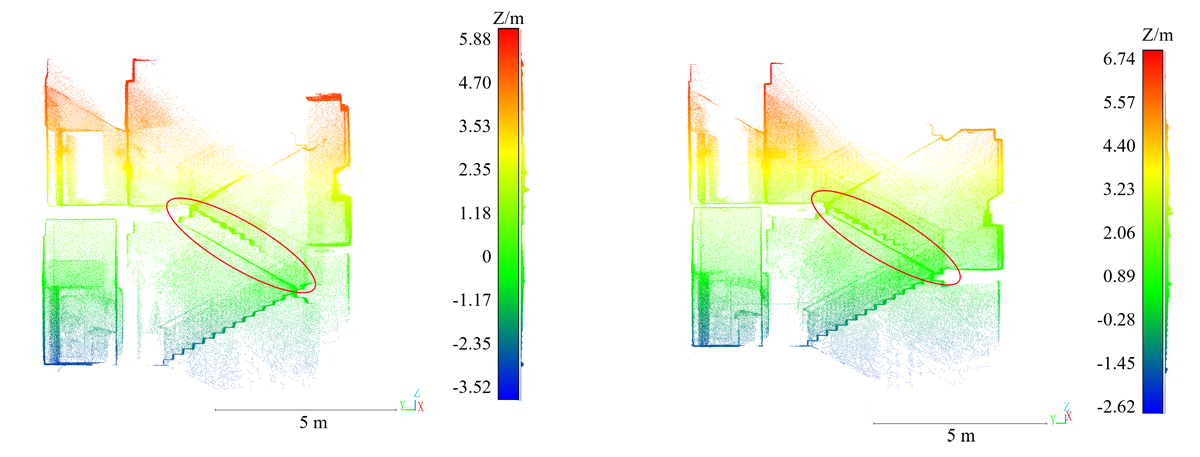
(b) FAST-LIO2 (c) DA-LIO (本研究方法)
图2 前端方法序列4建图效果对比
该成果第一作者为河海大学吴唯同博士后,通讯作者为武汉大学陈驰教授,主要合作者包括我校何秀凤教授、武汉大学杨必胜教授、梁福逊副研究员、博士生徐宇航和南昌大学邹响红博士后。研究工作得到国家自然科学基金联合基金项目(U22A20568)、国家重点研发计划(2022YFB3904101)、国家自然科学基金青年项目(42401538)、中央高校基本科研业务费(B240201098)等项目资助。
论文信息:Wu Weitong, Chen Chi*, Yang Bisheng, Zou Xianghong, Liang Fuxun, Xu Yuhang, He Xiufeng. (2025). DALI-SLAM: Degeneracy-aware LiDAR-inertial SLAM with novel distortion correction and accurate multi-constraint pose graph optimization. ISPRS Journal of Photogrammetry and Remote Sensing, 221: 92-108.
原文链接:https://www.sciencedirect.com/science/article/abs/pii/S0924271625000413