

随着北斗卫星导航系统从专业应用扩展到大众市场,其观测条件变得日益复杂,如观测环境恶劣化、接收设备轻量化、信号类型多样化等,容易引起非模型化误差突出、数据质量频繁恶化、数学模型解算异常等难题,难以获得精确可靠的导航定位结果。近期,地学院测绘工程研究所在复杂条件下北斗/GNSS精密导航定位与位置服务理论方法及应用方面取得了一系列研究进展。

图1 复杂条件下北斗/GNSS精密导航定位问题
在非模型化误差精细处理方面,系统提出并研究了GNSS非模型化误差处理理论与方法。具体包括:构建了经典的GNSS非模型化误差实时探测理论,检验有效率达到90%以上;提出了GNSS非模型化误差精确补偿方法,重点包括高时效随机模型弹性优化策略以及高容错函数模型弹性调整方案,能使RTK和PPP精度稳定在厘米级甚至毫米级;给出了顾及非模型化误差的GNSS数据质量可靠控制策略,重点提出了几种易于实现的多路径、差分码偏差(DCB)和系统间偏差(ISB)的评估控制方法,有效提升了定位精度和可靠性。
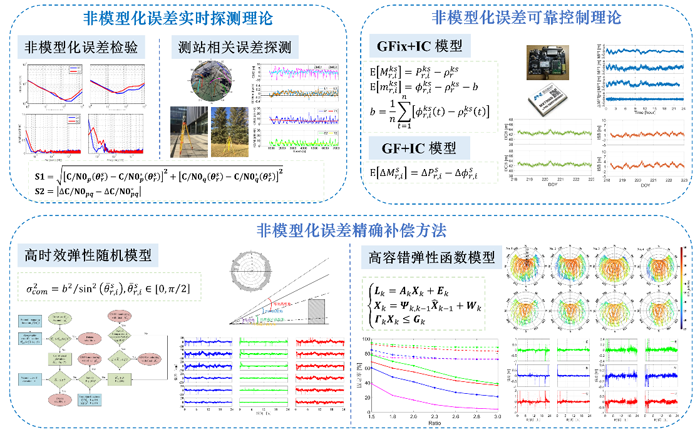
图2 非模型化误差精细处理理论与方法
在异常数据准确修复方面,系统研究了复杂条件下GNSS异常数据预处理和后控制的理论与方法。具体包括:给出了面向恶劣观测条件的周跳探测与修复的基本原理和方法,提出了周跳探测与修复的统一化方法,有效解决了小周跳、多周跳、连续周跳、不敏感周跳等处理难题;完善了复杂条件下的粗差识别与处理方法,重点提出了顾及多路径的扩展稳健估计方法,以及考虑验前新息和验后残差的联合数据探测方法,显著改善了多粗差以及系统误差、粗差混叠问题,能使导航定位精度接近于甚至达到理想观测条件下的精度。
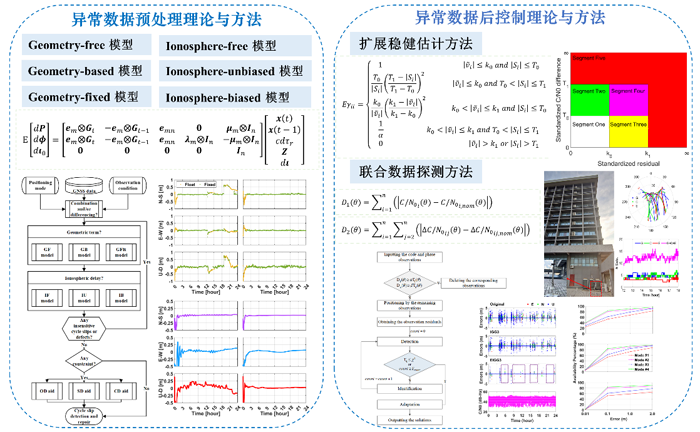
图3 异常数据准确修复理论与方法
在模糊度快速解算固定方面,系统研究了面向复杂条件的GNSS模糊度快速收敛固定理论与方法。具体成果包括:发展了由恶劣观测环境或低成本接收机等引起模型有偏状态下的模糊度快速解算方法,重点给出了附加质量控制的最优整数等变估计方法,以及基于非监督学习的最优整数等变估计方法,有效解决了偏差引起的模糊度固定率低、可靠性差的问题;扩展和统一了多频相位模糊度固定(MCAR)理论,给出了顾及非模型化误差的MCAR最优模型和估计方法,尤其窄巷固定率提升约20%,且有效缩短了固定时间。
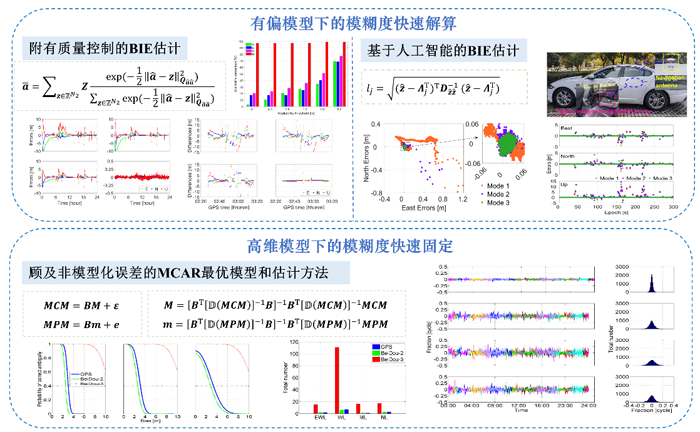
图4 模糊度快速解算固定理论与方法
近年来,相关成果发表在《Journal of Geodesy》、《GPS Solutions》以及《IEEE Transactions on Aerospace and Electronic Systems》等大地测量与卫星导航领域权威期刊上。论文主要作者为章浙涛副教授、研究生袁海军、李雪珍、李媛、董毅等,合作作者包括河海大学何秀凤教授、文援兰教授,同济大学李博峰教授等,并得到了中国科学院院士杨元喜研究员的指导,该研究获国家自然科学基金、江苏省自然科学基金、中国博士后科学基金以及技术开发等项目的支持,并已实际推广应用。
主要相关论文信息:
1. Zhang Z, Zeng J, Li B, He X. Principles, methods and applications of cycle slip detection and repair under complex observation conditions. Journal of Geodesy, 2023, 97: 50.(中科院一区TOP)
2. Zhang Z, Li Y, He X, Chen W, Li B. A composite stochastic model considering the terrain topography for real-time GNSS monitoring in canyon environments. Journal of Geodesy, 2022, 96: 79.(中科院一区TOP)
3. Zhang Z. Code and phase multipath mitigation by using the observation-domain parameterization and its application in five-frequency GNSS ambiguity resolution. GPS Solutions, 2021, 25: 144.(中科院一区TOP)
4. Zhang Z, Li Y, He X, Hsu L. Resilient GNSS real-time kinematic precise positioning with inequality and equality constraints. GPS Solutions, 2023, 27: 116.(中科院一区TOP)
5. Zhang Z, Yuan H, Li B, He X, Gao S. Feasibility of easy-to-implement methods to analyze systematic errors of multipath, differential code bias, and inter-system bias for low-cost receivers. GPS Solutions, 2021, 25: 116.(中科院一区TOP)
6. Zhang Z, Li B, He X, Zhang Z, Miao W. Models, methods and assessment of four-frequency carrier ambiguity resolution for BeiDou-3 observations. GPS Solutions, 2020, 24: 96.(中科院一区TOP)
7. Yuan H, Zhang Z, He X, Dong Y, Zeng J, Li B. Multipath mitigation in GNSS precise point positioning using multipath hierarchy for changing environments. GPS Solutions, 2023, 27: 193.(中科院一区TOP)
8. Zhang Z, Li X, Yuan H. Best integer equivariant estimation based on unsupervised machine learning for GNSS precise positioning and navigation in complex environments. IEEE Transactions on Aerospace and Electronic Systems, 2023.(中科院二区TOP)
9. Zhang Z, Yuan H, He X, Li B, Geng J. Best Integer Equivariant Estimation With Quality Control in GNSS RTK for Canyon Environments. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 4105-4117.(中科院二区TOP)
10. Yuan H, Zhang Z, He X, Wen Y, Zeng J. An extended robust estimation method considering the multipath effects in GNSS real-time kinematic positioning. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 8504509.(中科院二区)